



Davide Scaramuzza
Professor and Director of the Robotics and Perception Group
BOOK SELECT PUBLICATIONS CV VISUAL ODOMETRY TUTORIAL
HOBBIES OCamCalib TOOLBOX CONTACT
Biography

Davide Scaramuzza is a Professor of Robotics and Perception at the University of Zurich. He did his Ph.D. at ETH Zurich, a postdoc at the University of Pennsylvania, and was a visiting professor at Stanford University and NASA Jet Propulsion Laboratory. His research focuses on autonomous, agile navigation of mobile robots using standard and event-based cameras. He made fundamental contributions to visual-inertial state estimation, autonomous vision-based agile navigation of micro flying robots, and low-latency perception with event cameras, which were transferred to many products, from drones to automobiles, cameras, AR/VR headsets, and mobile devices. He pioneered autonomous, vision-based navigation of drones, which inspired the algorithm of the NASA Mars helicopter. In 2022, his team demonstrated that an AI-powered drone could outperform the world champions of drone racing. He received several awards, including a IEEE Technical Field Award, the IEEE Fellowship, the IEEE Robotics and Automation Society Early Career Award, a European Research Council Consolidator Grant, a Google Research Award, and many paper awards. In 2015, he co-founded Zurich-Eye, today Meta Zurich, which developed the head-tracking software of the Meta Quest. In 2020, he co-founded SUIND, which builds autonomous drones for precision agriculture. Many aspects of his research have been featured in the media, such as The New York Times, The Guardian, The Economist, and Forbes. He co-authored the book "Introduction to Autonomous Mobile Robots," published by MIT Press, which has sold over 10 thousand copies worldwide and is among the most used textbooks for teaching mobile robotics. He has been consulting the United Nations on disaster response, the Fukushima Action Plan, disarmament, and AI for good. FOR A DETAILED BIOGRAPHY CHECK OUT HERE.
Contributions
Davide Scaramuzza is most known for:
- (1) first AI drone that defeated world champion drone racing pilots. video, paper, YouTube (Ours), YouTube (Nature).
- (2) pioneering contributions to learning agile vision-based flight. video, paper, research.
- (3) pioneering contributions to event-camera-based algorithms for mobile robots. 2014, 2017. Link to the research page.
- (4) pioneering contributions to visual-inertial-SLAM-based autonomous navigation of micro drones. ICRA'10 paper.
- (5) inventing the 1-point RANSAC algorithm, an effective and computationally efficient (1000 times faster) reduction of the standard 5-point RANSAC for visual odometry, when the vehicle motion is non-holonomic. IJCV'11 paper.
- (6) developing the Omnidirectional Camera Calibration Toolbox for MATLAB (OCamCalib), used at many companies (e.g., NASA, Philips, Bosch, Daimler, etc.). LINK. The toolbox is also part of the Matlab Computer Vision Toolbox.
In the Press (full list here)

30.08.2023 The Guardian
IEEE Spectrum reports on our AI-powered drone defeating the world champion drone racing pilots! : [ Link ]

26.10.2021 Forbes
This hotshot AI drone can speed through complex environments thanks to new kind of virtual training : [ Link ]
23.07.2021 Forbes
"AI-Controlled Drone Racer Has Beaten Human Pilots For The First Time" [ Link ]

09.01.2020 New York Times
"A drone from the University of Zurich is an engineering and technical marvel..." (full article)

29.05.2019 BBC
Tech gives drone the ability to avoid mid-air crashes [ Link ]
21.04.2015BBC
"Drones Under Control" [ Link ]
16.05.2019 La Repubblica
L'intervista - Davide Scaramuzza: "Ma devono imparare a muoversi da soli" [ Link ]
14.12.2018 La Repubblica
Droni con 'ali pieghevoli' per passare ovunque[ Link ]
14.02.2018La Repubblica
Tra alberi e palazzi ora il drone fa lo slalom [ Link ]

27.07.2019Neue Zurcher Zeitung
"In der Forschung zu autonom fliegenden Drohnen spielt die Uni Z rich weltweit an vorderster Front mit. Jetzt kann sich deren Robotics-Team an einem internationalen Drohnenrennen in den USA beweisen" [ Link ]
30.08.2018Neue Zurcher Zeitung
"Wie Robotikprofessor Scaramuzza Erdbebenopfern mit Drohnen helfen will [ Link ]
24.01.2018Neue Zurcher Zeitung
"So kommen Drohnen sicher durch die Stadt" [ Link ]

31.08.2023 IEEE Spectrum
IEEE Spectrum reports on our AI-powered drone defeating the world champion drone racing pilots: [ Link ]
08.10.2021 IEEE Spectrum
Autonomous racing drones dodge through forests at 40 kph: [ Link ]
09.02.2021 IEEE Spectrum
Our work on autonomous quadrotor flight despite rotor failure with onboard vision sensors is featured on IEEE Spectrum: [ Link ]
08.10.2020 IEEE Spectrum
Our work on Deep Drone Acrobatics is featured on IEEE Spectrum. AI-Powered Drone Learns Extreme Acrobatics: [ Link ]
04.06.2019 IEEE Spectrum
To Fly Solo, Racing Drones Have a Need for AI Speed Training [ Link ]
13.05.2019 IEEE Spectrum
"Event Camera Helps Drone Dodge Thrown Objects" [ Link ]
13.12.2018IEEE Spectrum
"Foldable Drone Changes Its Shape in Mid-Air" [ Link ]25.01.2018IEEE Spectrum
"AI-Powered Drone Mimics Cars and Bikes to Navigate Through City Streets" [ Link ]
25.09.2017IEEE Spectrum
Drone With Event Camera Takes First Autonomous Flight [ Link ]
28.09.2016IEEE Spectrum
"Aggressive Quadrotors Conquer Gaps With Ultimate Autonomy" [ Link ]
14.04.2015IEEE Spectrum
"You Can Launch This Quadrotor by Throwing It in the Air" [ Link ]
07.10.2014IEEE Spectrum
"Dynamic Vision Sensors Enable High-Speed Maneuvers With Robots" [ Link ]
03.05.2012IEEE Spectrum
"sFly Quadrotors Navigate Outdoors All By Themselves" [ Link ]
09.12.2016MIT Technology Review
"Watch This Robotic Quadcopter Fly Aggressively Through Narrow Gaps"[ Link ]

27.06.2018Wired
Drones Just Learned to Fly Solo, Which Means Pro Racers May Soon Meet Their Match [ Link ]
11.02.2016Wired
"This drone uses AI to find its way through a forest"[ Link ]
Video Highlights
September 13, 2023
The fundamental advantage of reinforcement learning over optimal control lies in its optimization objective.
September 1, 2023
Our AI Drone beats human world champion pilots in drone racing while only relying on onboard sensing and computing!
July 13, 2022
Our lab is featured on the Italian RAI1 TV program SuperQuark. Watch the full video report about our research on autonomous drones, from drone racing to search and rescue, from standard to event cameras. The video is in Italian with English subtitles.
October 15, 2021
Watch our drone flying at high speeds through cluttered environments! Read our Learning High-Speed Flight in the Wild paper for further etails.
June 11, 2021
TimeLens is the first event-based video frame interpolation method that generates high speed video from low framerate RGB frames and high-temporal-resolution asynchronous events. TimeLens achieves 50 times video ussamplig rates and 40 times memory footprint savings! a href="https://rpg.ifi.uzh.ch/TimeLens.html">Visit the project page
Jan 13, 2021
Watch our quadrotor flies after motor failure with only onboard vision sensors! Read our RA-L paper for further details.
June 11, 2020
Watch our drone flying very agile acrobatics maneuvers! Read our Deep Drone Acrobatics paper for further details.
March 18, 2020
Watch our drone play dodgeball using an event camera! Read our Science Robotics paper for further details.
December 13, 2018
The foldable drone (RAL'18 paper).
Career Awards, ERC, and SNF Awards
- 2025 - Elevation to the degree of IEEE Fellow
- 2024 - Kiyo Tomiyasu IEEE Technical Field Award (Link).
- 2019 - ERC (European Research Council) Consolidator Grant (2M EUR) (press release)
- 2019 - Elevation to the degree of IEEE Senior Member
- 2017 - Misha Mahowald Prize for Neuromorphic Engineering (Link).
- 2014 - IEEE Robotics and Automation Society Early Career Award (Link)."
- 2014 - SNSF-ERC Starting Grant (1.5M EUR)
- 2012 - European Young Researcher Award 2012 (Link).
Paper Awards
- 2023 - IROS Best Paper Award: "Autonomous Power Line Inspection with Drones via Perception-Aware MPC." PDF
- 2023 - IROS Workshop on Robot Perception and Mapping Best Paper Award for our paper HDVIO. PDF
- 2023 - China Frontier of Science Award for our paper "Learning high-speed flight in the wild." PDF
- 2023 - CVPR Best Paper Award finalist for our paper "Data-driven Feature Tracking for Event Cameras." PDF
- 2022 - NCCR Robotics Most Impactful Paper Award: first use of neural nets for vision-based drones. PDF
- 2022 - RAL Best Paper Award for our paper on controlling a quadrotor after motor failure using event cameras. PDF
- 2021 - NASA Tech Briefs Award: keeping drones flying despite motor failure thanks to event cameras PDF
- 2021 - IEEE Transactions on Robotics Best Paper Award Honorable Mention for our paper Deep Drone Racing
- 2020 - RSS Best Systems Paper Award for AlphaPilot
- 2020 - RSS Best Paper Award finalist for Deep Drone Acrobatics
- 2019 - NASA Tech Briefs Award for our paper "The Foldable Drone" PDF
- 2019 - RAL Best Paper Award Honorable Mention for paper "Ultimate SLAM". PDF
- 2018 - ICRA Workshop on SLAM Benchmarking Best Paper Award : trajectory evaluation for SLAM. PDF
- 2018 - CORL Best System Paper Award for our paper Deep Drone Racing. PDF
- 2018 - IEEE Transactions on Robotics Best Paper Award, PDF, Press coverage
- 2017 - IROS Best Paper Award finalist in Rescue Robotics. PDF
- 2017 - RSS Best Student Paper Award Finalist for our paper on Fast Trajectory Optimization. PDF
- 2016 - IROS Best Application Paper finalist for our paper on visual Odometry with Event Cameras. PDF
- 2016 - BMVC Best Industry Paper Award for our paper on Event-based Multi View Stereo. PDF
- 2015 - RSS Best Paper Award finalist! for our paper on IMU Preintegration. PDF
Industry and Competition Awards
- 2023 - Meta Distinguished Faculty Award
- 2019 - Drone Hero Contest 2019 - Innovative Drone for the foldable drone
- 2019 - Intel Network of Intelligent System Award
- 2019 - Meta Distinguished Faculty Award
- 2018 - Intel Network of Intelligent System Award
- 2018 - IROS 2018 Autonomous Drone Race 1st place winner
- 2017 - IROS 2017 Autonomous Drone Race 2nd place winner
- 2017 - Intel Network of Intelligent System Award
- 2017 - EU Robotics Transfer Award to Fotokite
- 2016 - AAAI Video Award finalist
- 2014 - KUKA Innovation Award (20,000 EUR)
- 2014 - Google Faculty Research Award
- 2010 - George Giralt PhD Award finalist (for the best European PhD thesis in robotics)
- 2009 - ROBOTDALEN Scientific Award (Link) for the PhD thesis in robotics. Sponsored by EU, IEEE, ABB.
- 2009 - European Micro Aerial Vehicle competition (Link).
- 2005 - FEDERCOMIN-AICA Master thesis Award for the best Italian master's thesis in ICT (Link).
- 2004 - Best student of the year Award, Ternana Opera Educatrice, Terni, Italy.
Talks
ETH Zurich Seminar - November 2023
Human-Level Performance with Autonomous Vision-based Drones - Davide Scaramuzza
CORL - November 2021 Keynote
Learning to Fly in the Wild
CMU Seminar - October 2021 Seminar
Visual SLAM
IEEE RAS Interview - July 2021
My research plus lab tour
MIT Robotics Today Seminar - November 2020
Autonomous, Agile Micro Drones: Perception, Learning, and Control
TEDx Zurich - November 2012
Autonomous Flying Robots
Podcasts
InControl - October, 2023
Vision-based Autonomous Navigation, Agile Drone Racing, Event Cameras
IEEE Spectrum Podcast - October 2023
Drones That Can Fly Better Than You Can
RoboHub Podcast - March 2022
Event Cameras
IEEE RAS Interview - July 2021
My research plus lab tour
Book
I was the main author of this second edition to which I dedicated a full year of intense writing and literature research. This second edition has been revised and updated throughout, with 130 pages of new material on such topics as locomotion, perception, localization, and planning and navigation. Problem sets have been added at the end of each chapter. Bringing together all aspects of mobile robotics into one volume, Introduction to Autonomous Mobile Robots can serve as a textbook or a working tool for beginning practitioners in their Master or PhD programs.
Introduction to autonomous mobile robots 2nd Edition (hardback)
A Bradford Book, The MIT Press, ISBN: 978-0-262-01535-6, February, 2011
Select Publications
For a full list of publications, see here or Google Scholar.
Low Latency Automotive Vision with Event Cameras
Nature, 2024.
PDF Open Access Code Training code Dataset Dataset Helper Tools YouTube

Champion-level Drone Racing using Deep Reinforcement Learning
Nature, 2023
Reaching the Limit in Autonomous Racing: Optimal Control vs. Reinforcement Learning
Science Robotics, 2023

Autonomous Power Line Inspection with Drones via Perception-Aware MPC
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
Best Paper Award!
Data-driven Feature Tracking for Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
Award Candidate.
A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight
IEEE Transactions on Robotics, 2022
Model Predictive Contouring Control for Time-Optimal Quadrotor Flight
IEEE Transactions on Robotics, 2022
Policy Search for Model Predictive Control with Application for Agile Drone Flight
IEEE Transactions on Robotics (T-RO), 2022.

Learning High-Speed Flight in the Wild
Science Robotics, 2021.

AlphaPilot: Autonomous Drone Racing
Autonomous Robots (AuRo), 2021
Best Systems Paper Award!
Time-Optimal Planning for Quadrotor Waypoint Flight
Science Robotics, July 21, 2021.
NeuroBEM: Hybrid Aerodynamic Quadrotor Model
Robotics: Science and Systems (RSS), 2021.

TimeLens: Event-based Video Frame Interpolation
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, 2021.

Super-Human Performance in Gran Turismo Sport Using Deep Reinforcement Learning
IEEE Robotics and Automation Letters (RA-L), 2021.
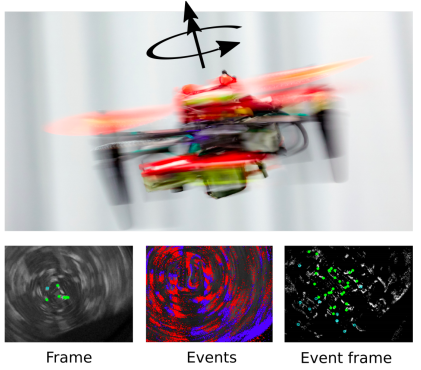
Autonomous Quadrotor Flight despite Rotor Failure with Onboard Vision Sensors: Frames vs. Events
IEEE Robotics and Automation Letters (RA-L), 2021.
Best Paper Award!

Deep Drone Acrobatics
Robotics: Science and Systems (RSS), 2020
Best Paper Award finalist!

Dynamic Obstacle Avoidance for Quadrotors with Event Cameras
Science Robotics, March 18, 2020.

High Speed and High Dynamic Range Video with an Event Camera
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019.
Deep Drone Racing: From Simulation to Reality with Domain Randomization
IEEE Transactions on Robotics, 2019
YouTube PDF Code
EKLT: Asynchronous, Photometric Feature Tracking using Events and Frames
International Journal of Computer Vision (IJCV), 2019.
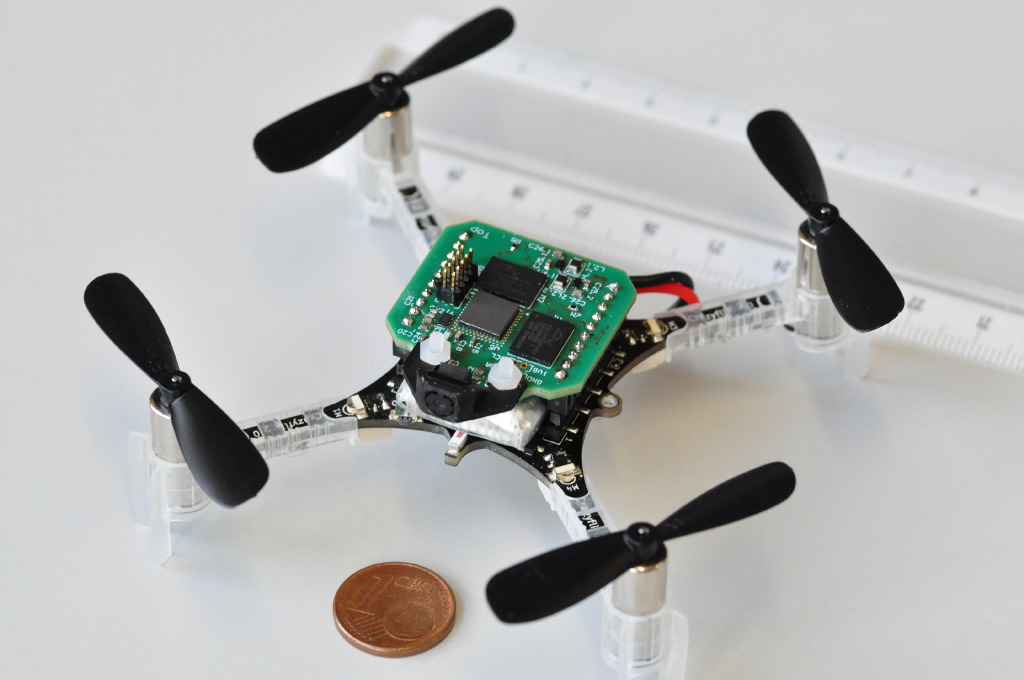
A 64mW DNN-based Visual Navigation Engine for Autonomous Nano-Drones
IEEE Internet of Things Journal, 2019
Video, PDF, Code
Event-based Vision: A Survey
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020.

The Foldable Drone: A Morphing Quadrotor that can Squeeze and Fly
IEEE Robotics and Automation Letters (RA-L), 2019.
A Unifying Contrast Maximization Framework for Event Cameras, with Applications to Motion, Depth and Optical Flow Estimation
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, 2018.
Spotlight Presentation.

DroNet: Learning to Fly by Driving
IEEE Robotics and Automation Letters (RA-L), 2018.
Ultimate SLAM? Combining Events, Images, and IMU for Robust Visual SLAM in HDR and High Speed Scenarios
IEEE Robotics and Automation Letters (RA-L), 2018.
Best Paper Award finalist (2nd out of 720 papers)!
On-Manifold Preintegration for Real-Time Visual-Inertial Odometry
IEEE Transactions on Robotics, vol 33, no. 1, pp. 1-21, Feb. 2017.
IEEE Transactions on Robotics' Best Paper Award 2017
RSS'15 Best Paper Award Finalist!
Oral Presentation: Acceptance Rate 4%
SVO: Semi-Direct Visual Odometry for Monocular and Multi-Camera Systems
IEEE Transactions on Robotics, Vol. 33, Issue 2, pages 249-265, Apr. 2017.
Includes comparison against ORB-SLAM, LSD-SLAM, and DSO and comparison among Dense, Semi-dense, and Sparse Direct Image Alignment.
Visual Odometry: Part I - The First 30 Years and Fundamentals
IEEE Robotics and Automation Magazine, Volume 18, issue 4, 2011.
Hobbies
In my free time, I like playing the piano and doing magic tricks. My passion for Magic started at the age of 14. I paid for my undergraduate studies by working part-time as a magician in restaurants, bars, and children parties, but I also did several performances on stage in public squares and theatres. Nowadays, I still play magic tricks for colleagues and friends and it has almost become a tradition during the social banquets of robotics conferences (usually ICRA and IROS) Below, you can see one of my latest shows during the Scientifica Zurich Science Festival. If you want to see more, you can check out my personal YouTube channel. But if you are looking for research videos, then you should check out my lab's YouTube channel! Here, you can read my interview from NCCR Robotics about my hobbies and how I decided to follow the academic career (link).

Long Biography
Davide Scaramuzza was born in Terni, Italy.
He received a Master's degree in Electronics and Information Engineering (2004, Summa cum Laude, thesis advisor: Prof. Paolo Valigi),
from the Intelligent Systems, Automation and Robotics Laboratory of the Department of Engineering, of the University of Perugia,
and a Ph.D. in Robotics and Computer Vision (2008, Ph.D. advisor: Prof. Roland Siegwart) from the Autonomous Systems Lab of the
Department of Mechanical and Process Engineering of ETH Zurich.
After a postdoc at the GRASP Lab of the University of Pennsylvania,
(postdoc advisors: Prof. Vijay Kumar and Prof. Kostas Daniilidis), he was appointed Assistant Professor at the Department of
Informatics of the University of Zurich in 2012.
In 2017, he got promoted to Tenured Associated Professor with double affiliation with the Department of Neuroinformatics,
a joint institute between the University of Zurich and ETH Zurich. In 2019, he was Visiting Associate Professor at the Department of Aeronautics and Astronautics of
Stanford University.
His research lies at the intersection of Robotics, Computer vision, and Machine Learning. Specifically, he investigates the use of standard cameras, event-based cameras (also known as neuromorphic cameras), and inertial sensors
for autonomous navigation of micro drones in challenging real-world scenarios, such as remote inspection and search and rescue after natural disasters.
These scenarios raise fundamental research challenges, which are currently unsolved, but also touch him personally: he comes from the center of Italy, which is often affected by earthquakes (link).
From 2009 to 2012, he was the Scientific and Technical Coordinator of the European project sFly, which pioneered visual-inertial autonomous drone navigation
in GPS-denied environments ([Bloesch, ICRA'10])
(which inspired the navigation algorithm of the NASA Ingenuity Mars helicopter
and many drone companies) and led to the development of the PX4 autopilot (developed by Lorenz Meier and supported by Auterion),
which is used by many commercial drone companies.
From 2015 to 2018, he was part of one of only three teams selected by DARPA for the Fast Lightweight Autonomy (FLA) Program to research autonomous, agile navigation of micro drones
in GPS-denied environments ([Mohta, JFR'18]). In 2018, his team won the IROS 2018 Autonomous Drone Race (video, paper) and,
in 2019, it ranked second in the AlphaPilot Drone Racing world championship (video, paper).
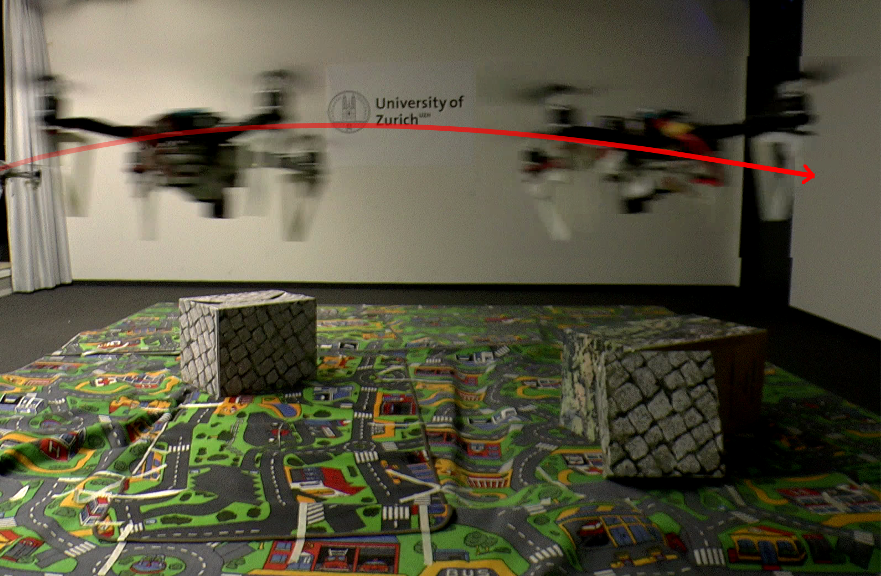
In 2022, he and his team organized the world's first AI vs. Human drone race, where their AI-powered, vision-based autonomous drone outperformed two world champion drone-racing pilots (link).
This result was published in Nature
and was featured in the magazine cover.
It marked the first time an AI defeated a human in the physical world
(previous AI wins, such as IBM Deep Blue against Gary Kasparov at chess in 1996, or Google DeepMind AlphaGo against Lee Sedol at Go in 2016, or
SONY Gran Turismo Sophy against the best human pilots in 2022, were conducted on board games on video games).
Davide Scaramuzza is recognized as a world expert in autonomous, vision-based drone navigation, visual odometry, and neuromorphic event cameras.
To promote research development in these fields, he has edited several journal special issues and co-organized many international workshops on visual navigation of drones and event cameras.
For his research contributions to visual-inertial state estimation, vision-based agile navigation of microdrones, and low-latency, robust perception with event cameras,
he won prestigious awards, such as a Kiyo Tomiyasu IEEE Technical Field Award
(won only by two other roboticists in the 20 years of existence of this award),
an IEEE Robotics and Automation Society Early Career Award
a European Research Council (ERC) Consolidator Grant, an SNSF-ERC Starting Grant,
a Google Research Award, a KUKA Innovation Award, two Qualcomm Innovation Fellowships, a European Young Researcher Award,
a Misha Mahowald Neuromorphic Engineering Award, two Facebook Distinguished Faculty Awards, and several paper awards,
including an ROS Best Paper Award, an IEEE Robotics and Automation Letters Best Paper Award, and an IEEE Transactions on Robotics Best Paper Award.
The IEEE Robotics and Automation Society Early Career Award and the Kiyo-Tomiyasu IEEE Technical Field Award represent the highest
recognitions for early-career and mid-career achievements, respectively, by the IEEE and the Robotics and Automation societies.
He has also been invited to speak at prestigious conferences, international workshops, and universities (full list in his CV).
He has published over 200 scientific articles (link) in top-ranked robotics and computer vision journals and conferences
(Nature, Science Robotics, T-PAMI, T-RO, IJRR, IJCV, JFR, ICRA, IROS, RSS, CVPR, ICCV) and has released over 80 Open Source software
packages. His publications have been cited over 47,000 times (Google Scholar).
His Google Scholar H-index is 106.
He co-authored the second edition of the book "Introduction to Autonomous Mobile Robots", published by MIT Press in 2011.
This book has sold over 10 thousand copies worldwide and is among the most used textbooks for teaching mobile robotics in universities.
He has served as a consultant for the United Nations on topics such as disaster response, disarmament, AI for good, and the Fukushima Action Plan on Nuclear Safety.
He has also consulted several drones and computer-vision companies, to which he has also transferred research results.
He also counts several entrepreneurial achievements.
In 2015, he co-founded Zurich-Eye, which was dedicated to commercializing visual-inertial localization and mapping solutions for mobile robots.
In 2016, Zurich-Eye became Facebook/Meta Zurich (English, German, recent news),
which developed the world-leading virtual-reality headset, Oculus Quest, which sold over 20 million units worldwide
(full story here).
In 2020, he co-founded SUIND, which developes smart agricultural drones.
He was also the strategic advisor of Dacuda, which developed the world's first mouse scanner (utilizing visual SLAM technology, video) and inside-out virtual-reality solutions. Dacuda became Magic Leap Zurich in 2017 (link).
Many aspects of his research have been prominently featured in broader media, such as The New York Times, The Economist, The Guardian, Forbes, Discovery Channel, La Repubblica, Neue Zurcher Zeitung and
also in technology-focused media, such as IEEE Spectrum, MIT Technology Review, Tech Crunch, Wired, and The Verge (full list here).
Contact
Address: University of Zurich, Andreasstrasse 15, Office 2.10, 8050 Zurich, Switzerland
Email: sdavide (at) ifi (dot) uzh (dot) ch (NB: for INTERNSHIP, PhD, and Postdoc applications, please read below)
Phone: +41 44 635 24 09
- INTERNSHIP applications: If you are seeking an internship in my lab you need to be enrolled in a Master program in your university. Applications from Bachelor students will not be answered. If you are a Master student and you wish to apply, please send me: 1) Your CV; 2) Transcripts of your Bachelor and Master grades; 3) a 2-page proposal containing: a) a description of the project you intend to do in my lab which is relevant to my research; b) comments on your experience in the area; c) related work, and d) a timeline of the project from the start to the end. Please make sure everything fits in two A4 page. Please do not send me reminders asking me the status of your application. I will answer only in case of positive feedback.
- PhD and Postdoc applications: check out my open positions here. Please notice that unsolicited applications will not be answered.