Learning High-Speed Flight in the Wild

We are excited to share our Science Robotics paper, done in collaboration with Intel!
Description
Quadrotors are agile. Unlike most other machines, they can traverse extremely complex environments at high speeds. To date, only expert human pilots have been able to fully exploit their capabilities. Autonomous operation with on-board sensing and computation has been limited to low speeds. State-of-the-art methods generally separate the navigation problem into subtasks: sensing, mapping, and planning. While this approach has proven successful at low speeds, the separation it builds upon can be problematic for high-speed navigation in cluttered environments. Indeed, the subtasks are executed sequentially, leading to increased processing latency and a compounding of errors through the pipeline. Here we propose an end-to-end approach that can autonomously fly quadrotors through complex natural and man-made environments at high speeds, with purely onboard sensing and computation. The key principle is to directly map noisy sensory observations to collision-free trajectories in a receding-horizon fashion. This direct mapping drastically reduces processing latency and increases robustness to noisy and incomplete perception. The sensorimotor mapping is performed by a convolutional network that is trained exclusively in simulation via privileged learning: imitating an expert with access to privileged information. By simulating realistic sensor noise, our approach achieves zero-shot transfer from simulation to challenging real-world environments that were never experienced during training: dense forests, snow-covered terrain, derailed trains, and collapsed buildings. Our work demonstrates that end-to-end policies trained in simulation enable high-speed autonomous flight through challenging environments, outperforming traditional obstacle avoidance pipelines.Paper, Code, and Datasets
If you use this work in your research, please cite the following paper:

Learning High-Speed Flight in the Wild
Science Robotics, 2021.
PDF (Science Robotics) PDF (Open Access) YouTube Code and Datasets
Summary Video
Highlights

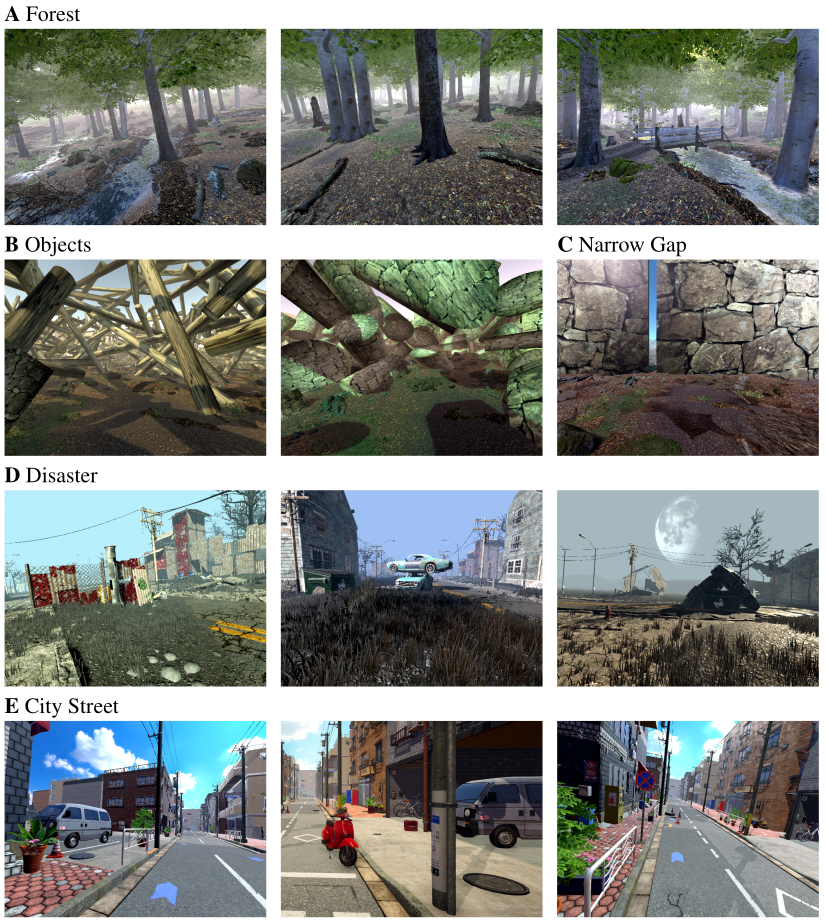
Testing Environments. Zero-shot generalization of our approach in complex natural (A to F) and man-made (H to O) environments. The encountered obstacles can often be avoided in multiple directions and have very different size and structure.
Simulation Environments