VIMO: Simultaneous Visual Inertial Model-based Odometry and Force Estimation
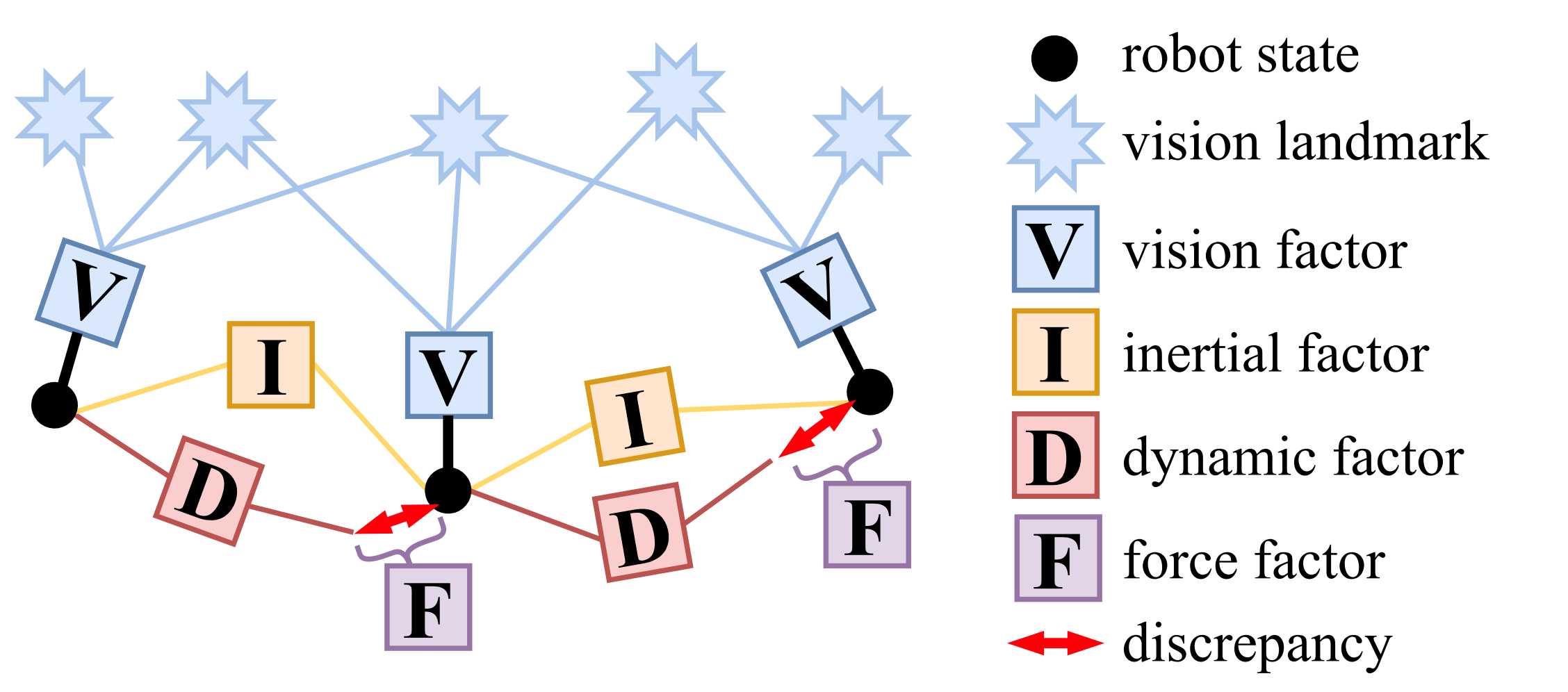
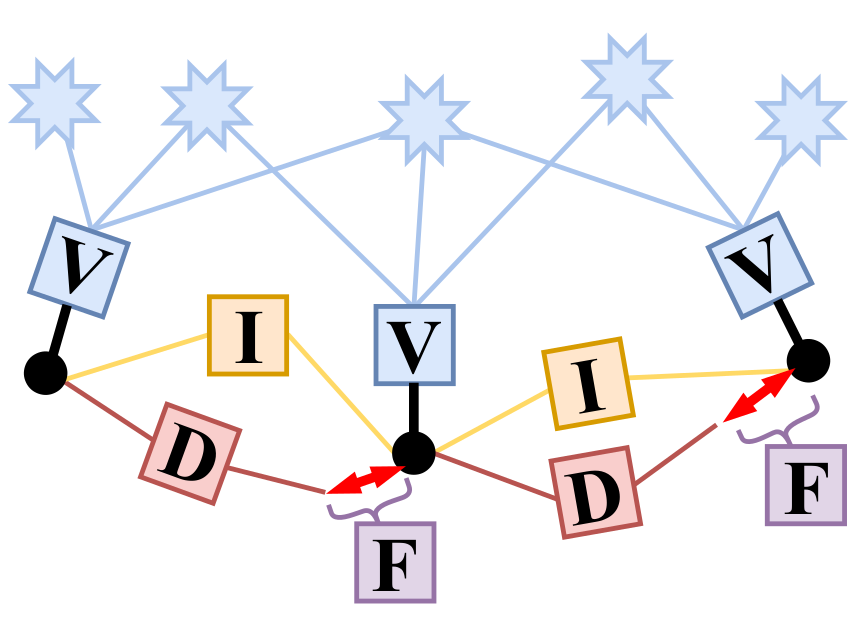
For many robotic applications, it is often essential to sense the external force acting on the system due to, for example, interactions, contacts, and disturbances. VIMO extends the capability of a typical optimization-based Visual-Inertial Odometry framework to jointly estimate external forces in addition to the robot state and IMU bias, at no extra computational cost. The results also show up to 30% increase in the accuracy of the estimator.