



Space robotics presents unique challenges, from navigating GPS-denied planetary terrains to operating in extreme lighting and topographical conditions. Our research focuses on advancing visual-inertial odometry (VIO) and autonomous navigation systems tailored for extraterrestrial exploration. We explore efficient sensor fusion techniques to enhance robustness and accuracy in visual odometry, leveraging the strengths of asynchronous event-based cameras and traditional imaging sensors. Our work also investigates decentralized state estimation and communication strategies for collaborative multi-robot systems, ensuring scalability and resilience. These innovations enable precise navigation, efficient data usage, and reliable operation in the most challenging extraterrestrial environments.
Deep Visual Odometry with Events and Frames
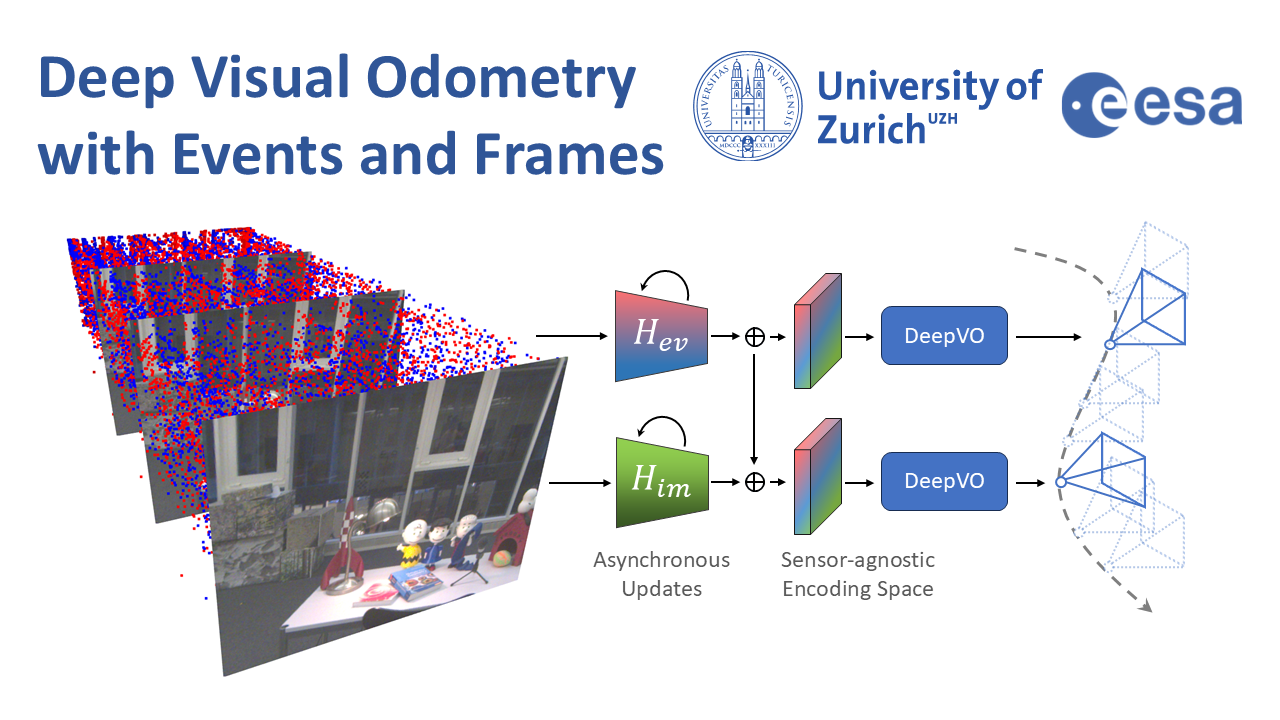
Visual Odometry (VO) is crucial for autonomous robotic navigation, especially in GPS-denied environments like planetary terrains. To improve robustness, recent model-based VO systems have begun combining standard and event-based cameras. While event cameras excel in low-light and high-speed motion, standard cameras provide dense and easier-to-track features. However, the field of image- and event-based VO still predominantly relies on model-based methods and is yet to fully integrate recent image-only advancements leveraging end-to-end learning-based architectures. Seamlessly integrating the two modalities remains challenging due to their different nature, one asynchronous, the other not, limiting the potential for a more effective image- and event-based VO. We introduce RAMP-VO, the first end-to-end learned image- and event-based VO system. It leverages novel Recurrent, Asynchronous, and Massively Parallel (RAMP) encoders capable of fusing asynchronous events with image data, providing 8x faster inference and 33% more accurate predictions than existing solutions. Despite being trained only in simulation, RAMP-VO outperforms previous methods on the newly introduced Apollo and Malapert datasets, and on existing benchmarks, where it improves image- and event-based methods by 58.8% and 30.6%, paving the way for robust and asynchronous VO in space.
References
Deep Visual Odometry with Events and Frames
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
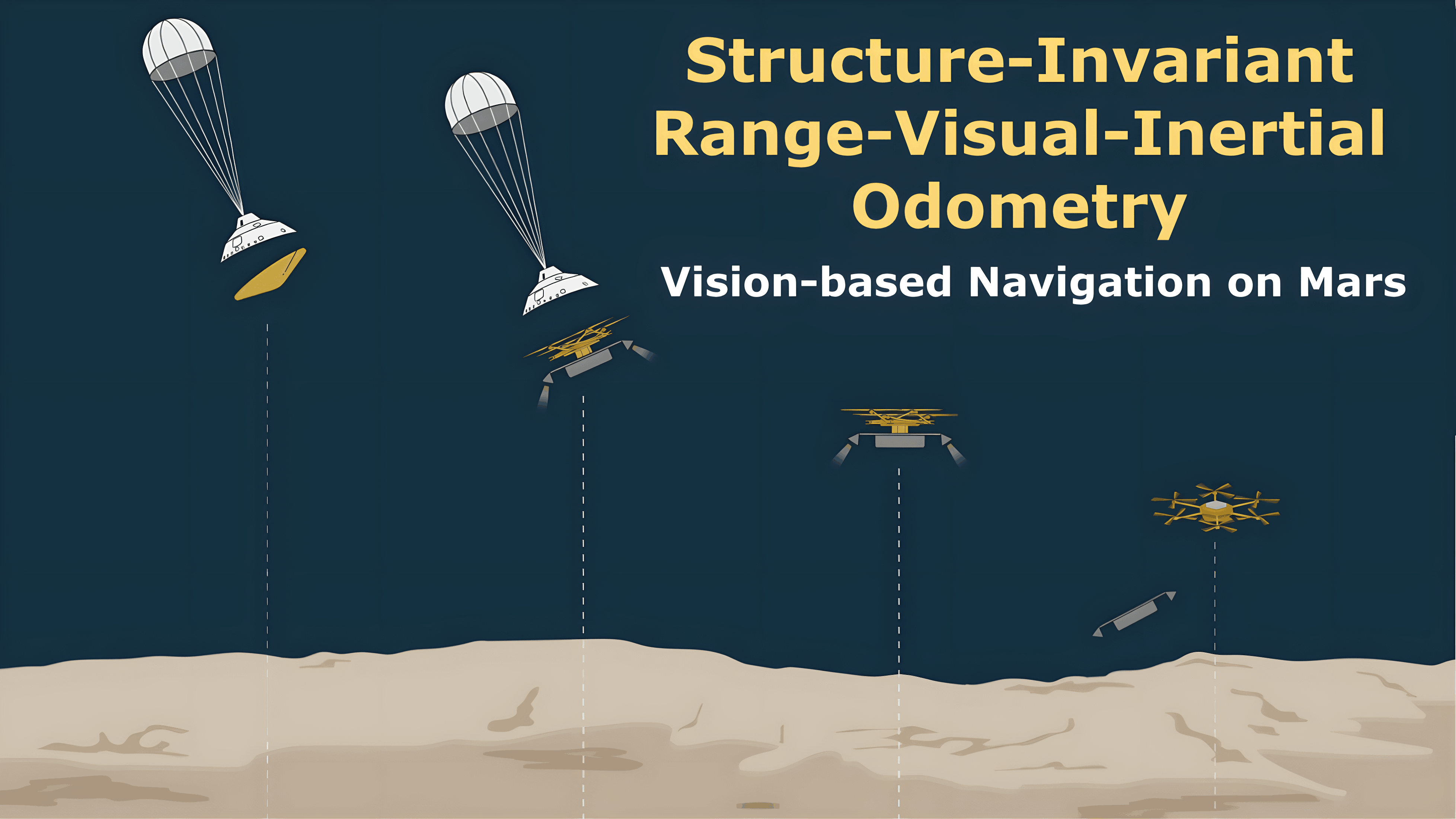
Structure-Invariant Range-Visual-Inertial Odometry
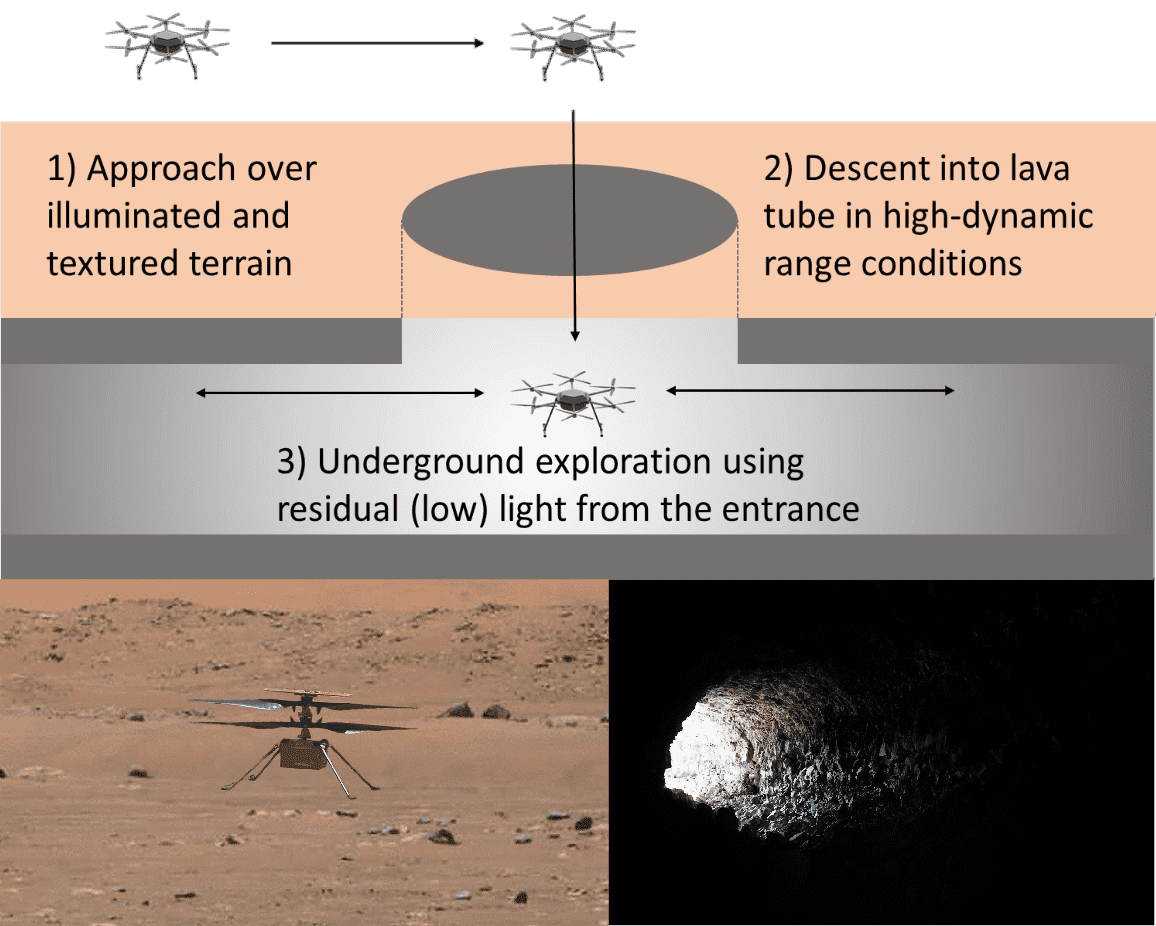
The Mars Science Helicopter (MSH) mission aims to deploy the next generation of unmanned helicopters on Mars, targeting landing sites in highly irregular terrain such as Valles Marineris, the largest canyons in the Solar system with elevation variances of up to 8000 meters. Unlike its predecessor, the Mars 2020 mission, which relied on a state estimation system assuming planar terrain, MSH requires a novel approach due to the complex topography of the landing site. This paper introduces a novel range-visual-inertial odometry system tailored for the unique challenges of the MSH mission. Our system extends the state-of-the-art xVIO framework by fusing consistent range information with visual and inertial measurements, preventing metric scale drift in the absence of visual-inertial excitation (mono camera and constant velocity descent), and enabling landing on any terrain structure, without requiring any planar terrain assumption. Through extensive testing in image-based simulations using actual terrain structure and textures collected in Mars orbit, we demonstrate that our range-VIO approach estimates terrain-relative velocity meeting the stringent mission requirements, and outperforming existing methods.
References
Data-Efficient Collaborative Decentralized Thermal-Inertial Odometry
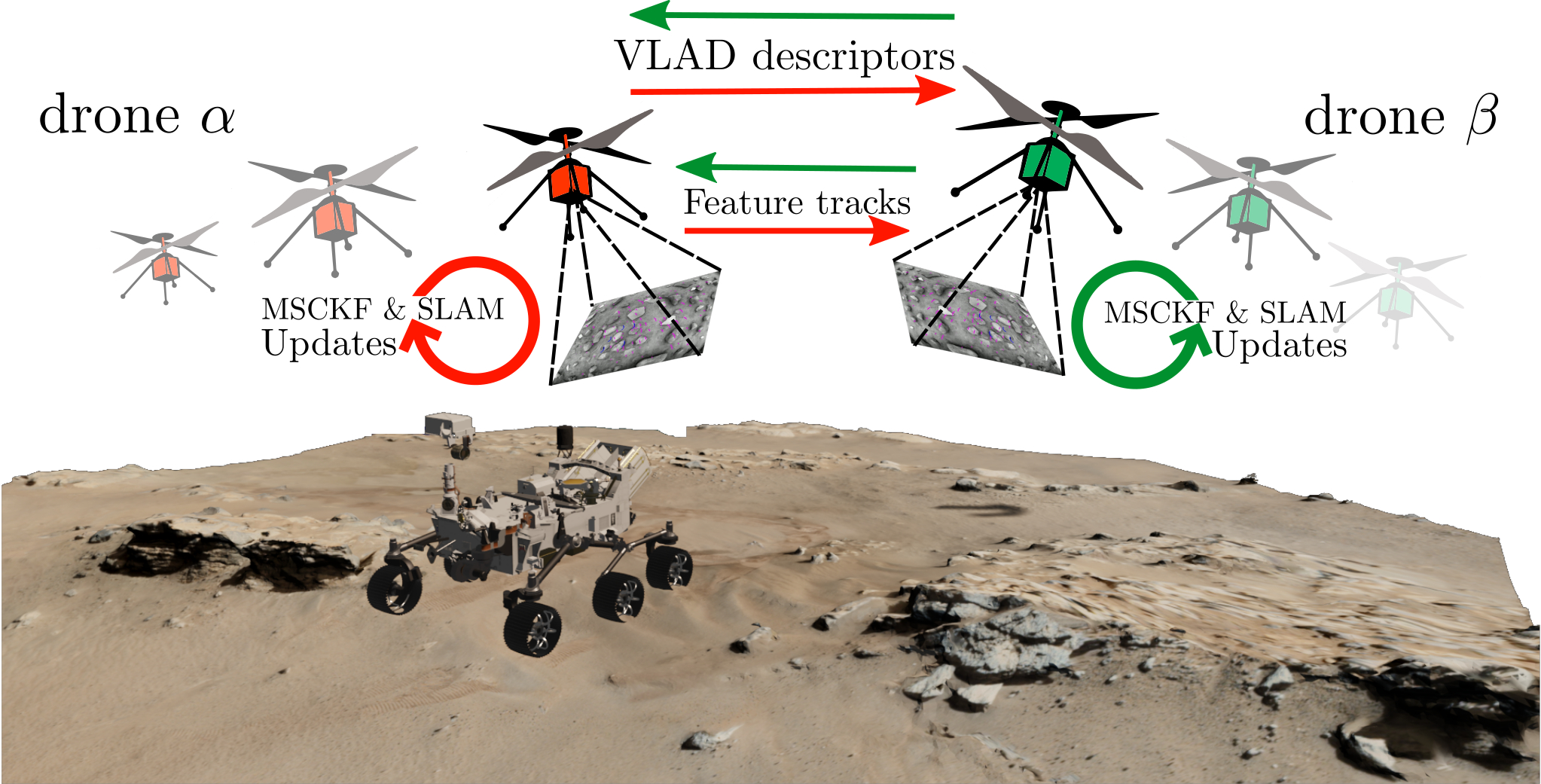
We propose a system solution to achieve data-efficient, decentralized state estimation for a team of flying robots using thermal images and inertial measurements. Each robot can fly independently, and exchange data when possible to refine its state estimate. Our system front-end applies an online photometric calibration to refine the thermal images so as to enhance feature tracking and place recognition. Our system back-end uses a covariance intersection fusion strategy to neglect the cross-correlation between agents so as to lower memory usage and computational cost. The communication pipeline uses Vector of Locally Aggregated Descriptors (VLAD) to construct a request-response policy that requires low bandwidth usage. We test our collaborative method on both synthetic and real-world data. Our results show that the proposed method improves by up to 46% trajectory estimation with respect to an individual-agent approach, while reducing up to 89% the communication exchange. Datasets and code are released to the public, extending the already-public JPL xVIO library.
References
Exploring Event Camera-based Odometry for Planetary Robots
References
Exploring Event Camera-based Odometry for Planetary Robots
Robotics and Automation Letters (RAL), 2022