



Active Vision and Exploration
Active vision is concerned with obtaining more information from the environment by actively choosing where and how to observe it using a camera.
EAAE: Energy-Aware Autonomous Exploration for UAVs in Unknown 3D Environments
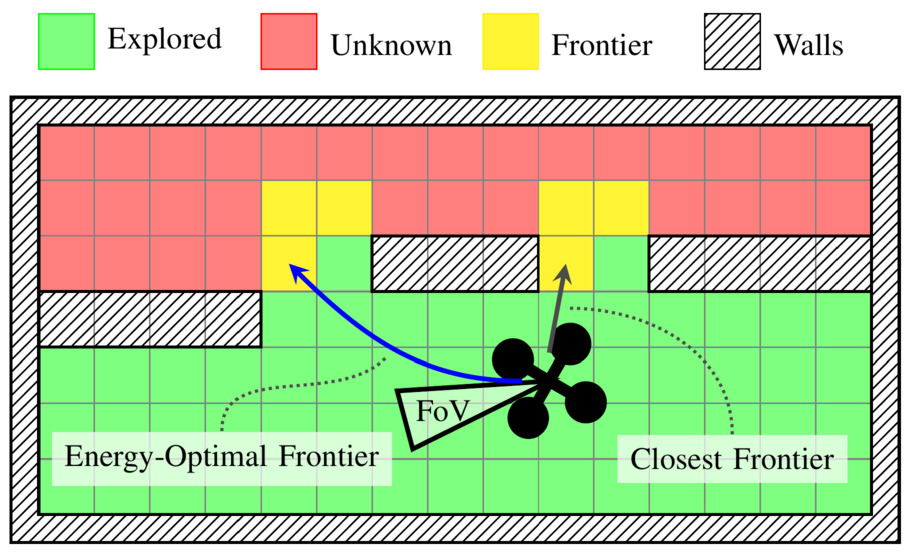
Battery-powered multirotor unmanned aerial vehicles (UAVs) can rapidly map unknown environments, but mission performance is often limited by energy rather than geometry alone. Standard exploration policies that optimise for coverage or time can therefore waste energy through manoeuvre-heavy trajectories. In this paper, we address energy-aware autonomous 3D exploration for multirotor UAVs in initially unknown environments. We propose Energy-Aware Autonomous Exploration (EAAE), a modular frontier-based framework that makes energy an explicit decision variable during frontier selection. EAAE clusters frontiers into view-consistent regions, plans dynamically feasible candidate trajectories to the most informative clusters, and predicts their execution energy using an offline power estimation loop. The next target is then selected by minimising predicted trajectory energy while preserving exploration progress through a dual-layer planning architecture for safe execution. We evaluate EAAE in a full exploration pipeline with a rotor-speed-based power model across simulated 3D environments of increasing complexity. Compared to representative distance-based and information gain-based frontier baselines, EAAE consistently reduces total energy consumption while maintaining competitive exploration time and comparable map quality, providing a practical drop-in energy-aware layer for frontier exploration.
References
Perception-Aware Time-Optimal Planning for Quadrotor Waypoint Flight

Agile quadrotor flight pushes the limits of control, actuation, and onboard perception. While time-optimal trajectory planning has been extensively studied, existing approaches typically neglect the tight coupling between vehicle dynamics, environmental geometry, and the visual requirements of onboard state estimation. As a result, trajectories that are dynamically feasible may fail in closed-loop execution due to degraded visual quality. This paper introduces a unified time-optimal trajectory optimization framework for vision-based quadrotors that explicitly incorporates perception constraints alongside full nonlinear dynamics, rotor actuation limits, aerodynamic effects, camera field-of-view constraints, and convex geometric gate representations. The proposed formulation solves minimum-time lap trajectories for arbitrary racetracks with diverse gate shapes and orientations, while remaining numerically robust and computationally efficient. We derive an information-theoretic position uncertainty metric to quantify visual state-estimation quality and integrate it into the planner through three perception objectives: position uncertainty minimization, sequential field-of-view constraints, and look-ahead alignment. This enables systematic exploration of the trade-offs between speed and perceptual reliability. To accurately track the resulting perception-aware trajectories, we develop a model predictive contouring tracking controller that separates lateral and progress errors. Experiments demonstrate real-world flight speeds up to 9.8 m/s with 0.07 m average tracking error, and closed-loop success rates improved from 55\% to 100\% on a challenging Split-S course. The proposed system provides a scalable benchmark for studying the fundamental limits of perception-aware, time-optimal autonomous flight.
References
PA-MPPI: Perception-Aware Model Predictive Path Integral Control for Quadrotor Navigation in Unknown Environments

Quadrotor navigation in unknown environments is critical for practical missions such as search-and-rescue. Solving this problem requires addressing three key challenges: path planning in non-convex free space due to obstacles, satisfying quadrotor-specific dynamics and objectives, and exploring unknown regions to expand the map. Recently, the Model Predictive Path Integral (MPPI) method has emerged as a promising solution to the first two challenges. By leveraging sampling-based optimization, it can effectively handle non-convex free space while directly optimizing over the full quadrotor dynamics, enabling the inclusion of quadrotor-specific costs such as energy consumption. However, MPPI has been limited to tracking control that optimizes trajectories only within a small neighborhood around a reference trajectory, as it lacks the ability to explore unknown regions and plan alternative paths when blocked by large obstacles. To address this limitation, we introduce Perception-Aware MPPI (PA-MPPI). In this approach, perception-awareness is characterized by planning and adapting the trajectory online based on perception objectives. Specifically, when the goal is occluded, PA-MPPI incorporates a perception cost that biases trajectories toward those that can observe unknown regions. This expands the mapped traversable space and increases the likelihood of finding alternative paths to the goal. Through hardware experiments, we demonstrate that PA-MPPI, running at 50 Hz, performs on par with the state-of-the-art quadrotor navigation planner for unknown environments in challenging test scenarios. Furthermore, we show that PA-MPPI can serve as a safe and robust action policy for navigation foundation models, which often provide goal poses that are not directly reachable.
References
What Matters in RL-Based Methods for Object-Goal Navigation? An Empirical Study and A Unified Framework
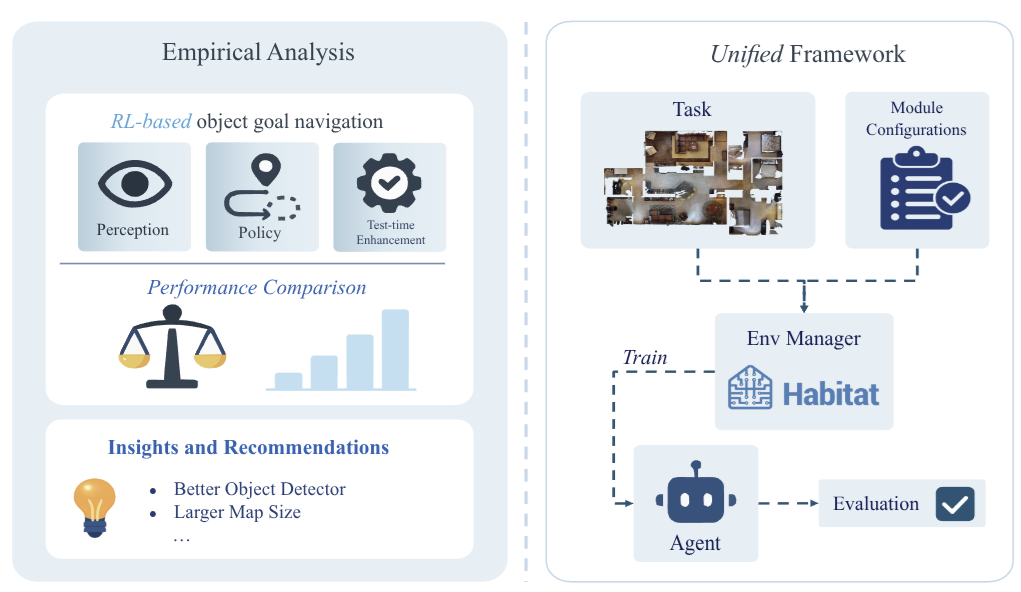
Object-Goal Navigation (ObjectNav) is a critical component toward deploying mobile robots in everyday, uncontrolled environments such as homes, schools, and workplaces. In this context, a robot must locate target objects in previously unseen environments using only its onboard perception. Success requires the integration of semantic understanding, spatial reasoning, and long-horizon planning, which is a combination that remains extremely challenging. While reinforcement learning (RL) has become the dominant paradigm, progress has spanned a wide range of design choices, yet the field still lacks a unifying analysis to determine which components truly drive performance. In this work, we conduct a large-scale empirical study of modular RL-based ObjectNav systems, decomposing them into three key components: perception, policy, and test-time enhancement. Through extensive controlled experiments, we isolate the contribution of each and uncover clear trends: perception quality and test-time strategies are decisive drivers of performance, whereas policy improvements with current methods yield only marginal gains. Building on these insights, we propose practical design guidelines and demonstrate an enhanced modular system that surpasses State-of-the-Art (SotA) methods by 6.6% on SPL and by a 2.7% success rate. We also introduce a human baseline under identical conditions, where experts achieve an average 98% success, underscoring the gap between RL agents and human-level navigation. Our study not only sets the SotA performance but also provides principled guidance for future ObjectNav development and evaluation.
References
What Matters in RL-Based Methods for Object-Goal Navigation? An Empirical Study and A Unified Framework
Arxiv 2025
Sight Over Site: Perception-Aware Reinforcement Learning for Efficient Robotic Inspection
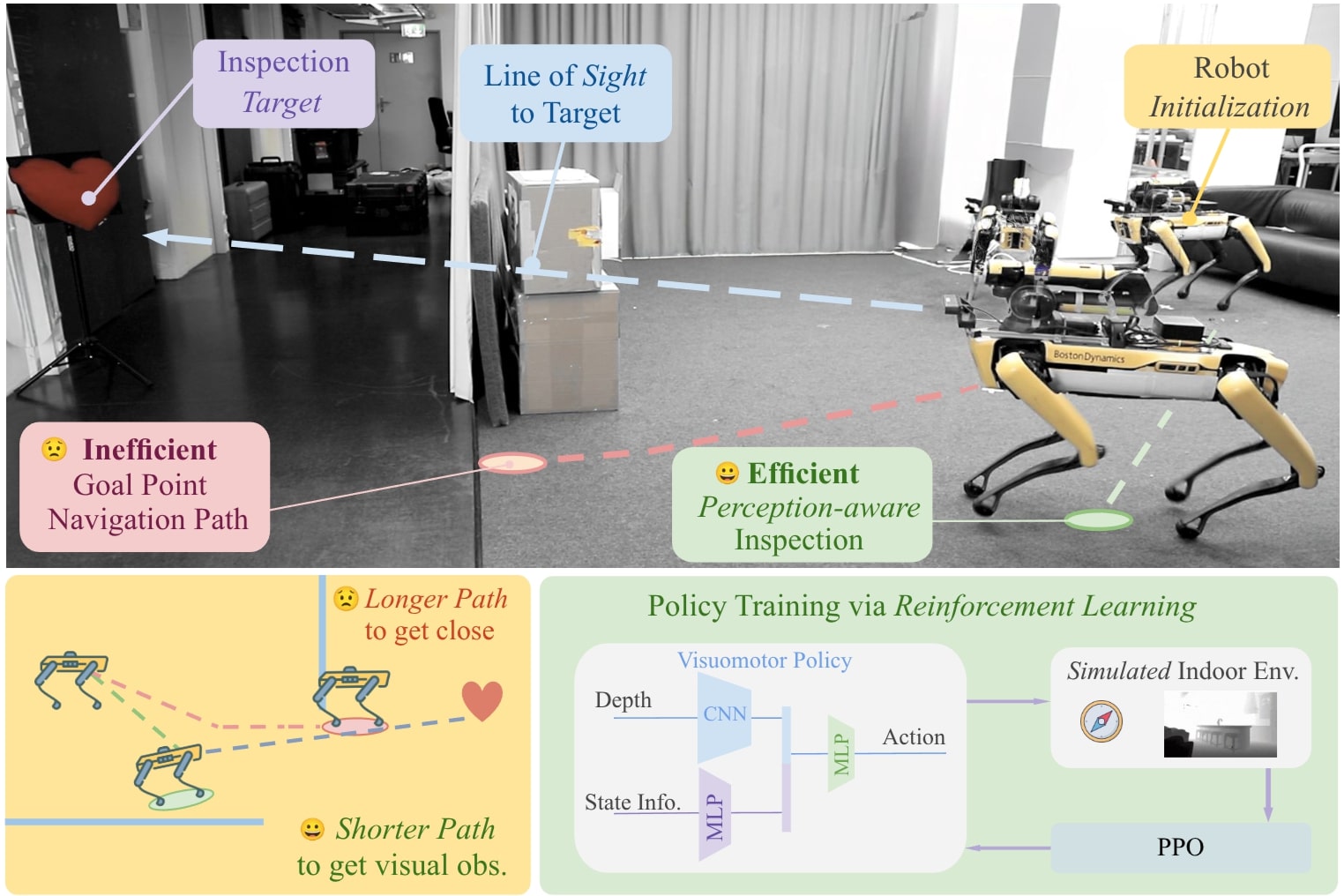
Quadrotor navigation in unknown environments is critical for practical missions such as search and rescue. Solving it requires addressing three key challenges: the non-convexity of free space due to obstacles, quadrotor-specific dynamics and objectives, and the need for exploration of unknown regions to find a path to the goal. Recently, the Model Predictive Path Integral (MPPI) method has emerged as a promising solution that solves the first two challenges. By leveraging sampling-based optimization, it can effectively handle non-convex free space while directly optimizing over the full quadrotor dynamics, enabling the inclusion of quadrotor-specific costs such as energy consumption. However, its performance in unknown environments is limited, as it lacks the ability to explore unknown regions when blocked by large obstacles. To solve this issue, we introduce Perception-Aware MPPI (PA-MPPI). Here, perception awareness is defined as adapting the trajectory online based on perception objectives. Specifically, when the goal is occluded, PA-MPPI’s perception cost biases trajectories that can perceive unknown regions. This expands the mapped traversable space and increases the likelihood of finding alternative paths to the goal. Through hardware experiments, we demonstrate that PA-MPPI, running at 50 Hz with our efficient perception and mapping module, performs up to 100% better than the baseline in challenging settings where the state-of-the-art MPPI fails. In addition, we demonstrate that PA-MPPI can be used as a safe and robust action policy for navigation foundation models, which often provide goal poses that are not directly reachable.
References
Sight Over Site: Perception-Aware Reinforcement Learning for Efficient Robotic Inspection
Arxiv 2025
ForesightNav: Learning Scene Imagination for Efficient Exploration

Understanding how humans leverage prior knowledge to navigate unseen environments while making exploratory decisions is essential for developing autonomous robots with similar abilities. In this work, we propose ForesightNav, a novel exploration strategy inspired by human imagination and reasoning. Our approach equips robotic agents with the capability to predict contextual information, such as occupancy and semantic details, for unexplored regions. These predictions enable the robot to efficiently select meaningful long-term navigation goals, significantly enhancing exploration in unseen environments.We validate our imagination-based approach using the Structured3D dataset, demonstrating accurate occupancy prediction and superior performance in anticipating unseen scene geometry. Our experiments show that the imagination module improves exploration efficiency in unseen environments, achieving a 100% completion rate for PointNav and an SPL of 67% for ObjectNav on the Structured3D Validation split. These contributions demonstrate the power of imagination-driven reasoning for autonomous systems to enhance generalizable and efficient exploration.
References
AERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Large-scale infrastructures are prone to deterioration due to age, environmental influences, and heavy usage. Ensuring their safety through regular inspections and maintenance is crucial to prevent incidents that can significantly affect public safety and the environment. This is especially pertinent in the context of electrical power networks, which, while essential for energy provision, can also be sources of forest fires. Intelligent drones have the potential to revolutionize inspection and maintenance, eliminating the risks for human operators, increasing productivity, reducing inspection time, and improving data collection quality. However, most of the current methods and technologies in aerial robotics have been trialed primarily in indoor testbeds or outdoor settings under strictly controlled conditions, always within the line of sight of human operators. Additionally, these methods and technologies have typically been evaluated in isolation, lacking comprehensive integration. This paper introduces the first autonomous system that combines various innovative aerial robots. This system is designed for extended-range inspections beyond the visual line of sight, features aerial manipulators for maintenance tasks, and includes support mechanisms for human operators working at elevated heights. The paper further discusses the successful validation of this system on numerous electrical power lines, with aerial robots executing flights over 10 kilometers away from their ground control stations.
References

Autonomous Power Line Inspection with Drones via Perception-Aware MPC
Drones have the potential to revolutionize power line inspection by increasing productivity, reducing inspection time, improving data quality, and eliminating the risks for human operators. Current state-of-the-art systems for power line inspection have two shortcomings: (i) control is decoupled from perception and needs accurate information about the location of the power lines and masts; (ii) collision avoidance is decoupled from the power line tracking, which results in poor tracking in the vicinity of the power masts, and, consequently, in decreased data quality for visual inspection. In this work, we propose a model predictive controller (MPC) that overcomes these limitations by tightly coupling perception and action. Our controller generates commands that maximize the visibility of the power lines while, at the same time, safely avoiding the power masts. For power line detection, we propose a lightweight learning-based detector that is trained only on synthetic data and is able to transfer zero-shot to real-world power line images. We validate our system in simulation and real-world experiments on a mock-up power line infrastructure.
References

Learning Perception-Aware Agile Flight in Cluttered Environments
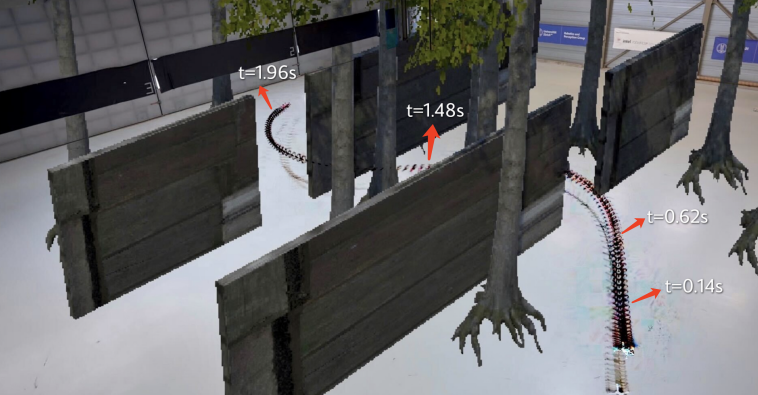
Recently, neural control policies have outperformed existing model-based planning-and-control methods for autonomously navigating quadrotors through cluttered environments in minimum time. However, they are not perception aware, a crucial requirement in vision-based navigation due to the camera's limited field of view and the underactuated nature of a quadrotor. We propose a method to learn neural network policies that achieve perception-aware, minimum-time flight in cluttered environments. Our method combines imitation learning and reinforcement learning (RL) by leveraging a privileged learning-by-cheating framework. Using RL, we first train a perception-aware teacher policy with full-state information to fly in minimum time through cluttered environments. Then, we use imitation learning to distill its knowledge into a vision-based student policy that only perceives the environment via a camera. Our approach tightly couples perception and control, showing a significant advantage in computation speed (10x faster) and success rate. We demonstrate the closed-loop control performance using a physical quadrotor and hardware-in-the-loop simulation at speeds up to 50 km/h.
References
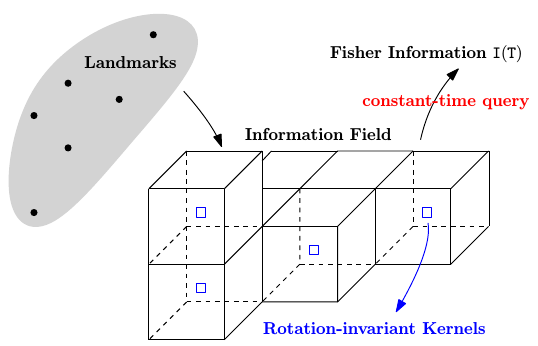
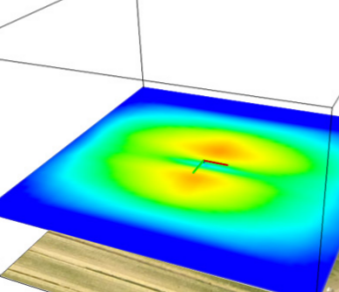
Fisher Information Field: an Efficient and Differentiable Map for Perception-aware Planning
References
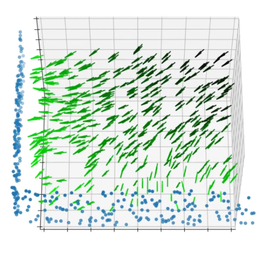
Fisher Information Field: an Efficient and Differentiable Map for Perception-aware Planning
arXiv preprint, 2020.
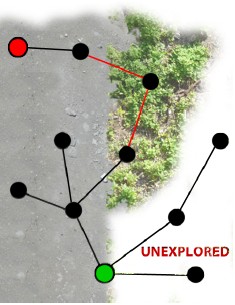
Exploration Without Global Consistency
References

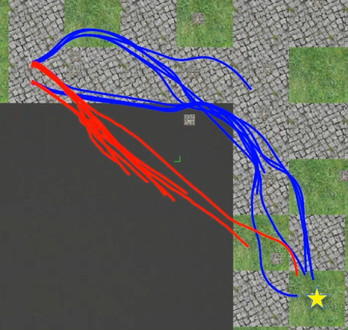
Fisher Information Field for Active Visual Localization
References
PAMPC: Perception-Aware Model Predictive Control
References

Perception-aware Receding Horizon Navigation for MAVs
References
Perception-aware Receding Horizon Navigation for MAVs
IEEE International Conference on Robotics and Automation, 2018.
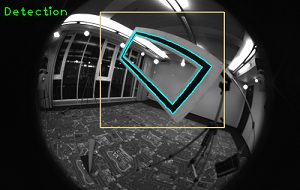
Aggressive Quadrotor Flight through Narrow Gaps with Onboard Sensing and Computing using Active Vision
References
Active Autonomous Aerial Exploration for Ground Robot Path Planning
References

Perception-aware Path Planning
References
Exploiting Photometric Information for Planning under Uncertainty
Springer Tracts in Advanced Robotics (International Symposium on Robotic Research), 2017.
PDF PDF of longer paper version (Technical report) YouTube
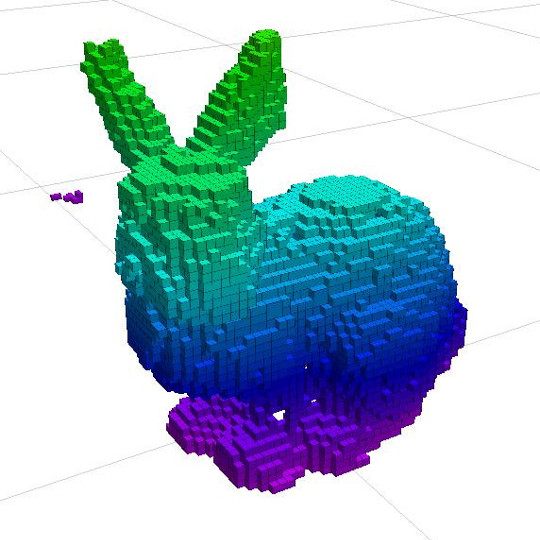
Information Gain Based Active Reconstruction
Download the code from GitHub.
References
Active, Dense Reconstruction
References
Appearance-based Active, Monocular, Dense Reconstruction for Micro Aerial Vehicles
Robotics: Science and Systems, Berkely, 2014.