Abstract
Event cameras report asynchronously per-pixel brightness changes with microsecond latency, encoding dynamic visual information as a sparse stream of events. However, their extreme temporal resolution floods perception systems with entangled events from ego-motion and independently moving objects (IMOs), which existing solutions fail to efficiently de- couple, relying instead on prohibitive dense 3D reconstructions or limited hand-tuned filters. In this work, we introduce the first framework for Motion-aware Event Suppression, which learns to filter events triggered by IMOs and ego-motion in real time. Our model jointly segments IMOs in the current event stream while predicting their future motion, enabling anticipatory suppression of dynamic events before they occur. Our lightweight architecture achieves 173 Hz inference on consumer-grade GPUs with less than 1 GB of memory usage, outperforming previous state-of-the- art methods on the challenging EVIMO benchmark by 67% in segmentation accuracy while operating at a 53% higher inference rate. Moreover, we demonstrate significant benefits for down- stream applications: our method accelerates Vision Transformer inference by 83% via token pruning and improves event-based visual odometry accuracy, reducing Absolute Trajectory Error (ATE) by 13%.
Method
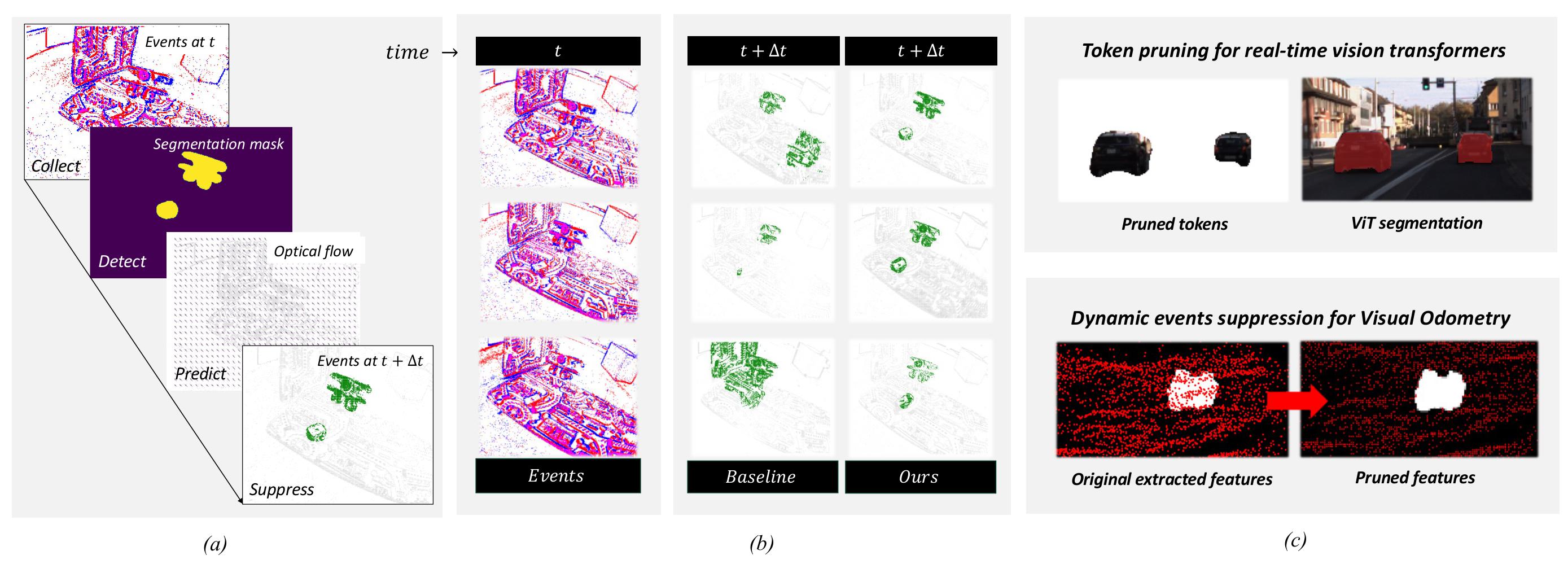
Our method disentangles ego-motion events from events triggered by independently moving objects (IMOs). (a) We jointly learn to segment IMOs and predict dense optical flow for the next $\Delta t$. Warping the mask forward yields an anticipated future mask, enabling suppression of future events. (b) Compared to baselines like EVIMO (baseline), our approach produces tighter masks with higher IoU and fewer false positives. (c) Event Suppression can be used for downstream tasks: (top) accelerating segmentation via motion-guided token pruning, and (bottom) improving visual odometry by filtering out dynamic IMO edges.
Visualization
box_seq_05
Seq_box_00
Seq_floor_00
tabletop_seq_00
Qualitative visualization on four EVIMO sequences using our suppression method.
BibTeX
@inproceedings{Pellerito2026Suppression,
title={Motion-aware Event Suppression for Event Cameras},
author={Pellerito, Roberto and Messikommer, Nico and Cioffi, Giovanni and Cannici, Marco and Scaramuzza, Davide},
booktitle={Robotics: Science and Systems 2026},
year={2026}
}