Learning visuomotor policies for agile quadrotor flight presents significant difficulties, primarily from inefficient policy exploration caused by highdimensional visual inputs and the need for precise and low-latency control. To address these challenges, we propose a novel approach that combines the performance of Reinforcement Learning (RL) and the sample efficiency of
Imitation Learning (IL) in the task of vision-based autonomous drone racing.
While RL provides a framework for learning high-performance controllers through trial and error, it faces challenges with sample efficiency and computational demands due to the high dimensionality of visual inputs. Conversely, IL efficiently learns from visual expert demonstrations, but it remains limited by the expert’s performance and state distribution.
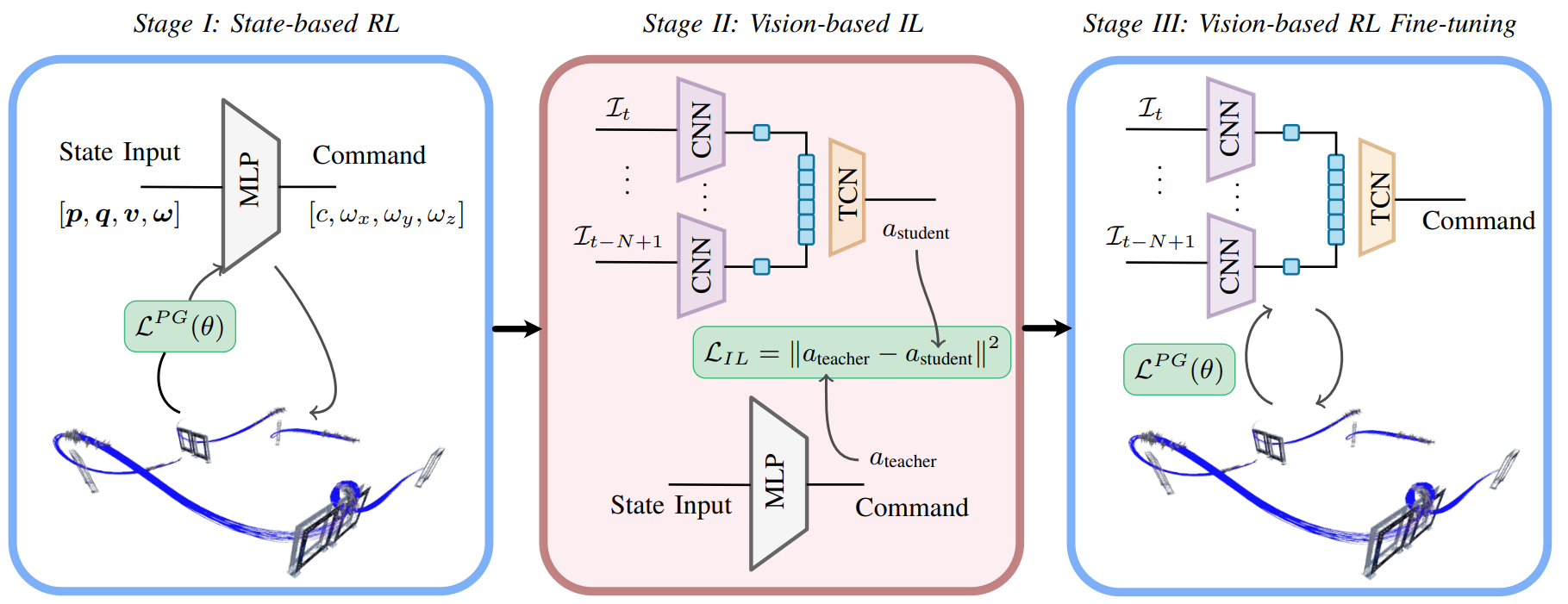
To overcome these limitations, our policy learning framework integrates the strengths of both approaches. Our framework contains three phases: training a teacher policy using RL with privilege state information, distilling it into a student policy via IL, and adaptive fine-tuning via RL. Testing in both simulated and real-world scenarios shows our approach can not only learn in scenarios where RL from scratch fails but also outperforms existing IL methods in both robustness and performance, successfully navigating a quadrotor through a race course using only visual
information.